NINA B406 sendo programado com NRF Connect + ZEPHYR RTOS via Visual Code


Um Ambiente de Desenvolvimento Integrado (IDE) é um aplicativo de software que fornece um ambiente de programação para agilizar o desenvolvimento e depuração de software. Em vez de realizar todas as etapas necessárias para fazer um programa executável ou gerar um firmware binário como tarefas individuais não relacionadas, os IDEs trazem todas as ferramentas necessárias para um aplicativo e espaço de trabalho. Cada uma das ferramentas tem consciência do ambiente e funcionam em harmonia para fornecer uma experiência de desenvolvedor muito boa fora da caixa, tanto para desenvolvedores novatos quanto para os experientes.
Mundo sem IDEs
Sem IDEs, os desenvolvedores precisam usar um editor, compilador e vinculador instalado em sua máquina de desenvolvimento para criar arquivos de código, compilá-los e vinculá-los. Isso às vezes pode ser opressor para novos desenvolvedores que primeiro precisam instalar e configurar todos os conjuntos de ferramentas necessários e manter uma guia de vários comandos para gerar os binários executáveis para atualizar os dispositivos, especialmente no mundo do desenvolvimento de sistemas embarcados.
O IDEs mais popular que a maioria de nós, desenvolvedores, usa diariamente é o Visual Studio Code da Microsoft. Um dos principais motivos pelos quais o VS Code assumiu o controle de outros IDEs é a capacidade de oferecer suporte a extensões de terceiros. Essas extensões permitem adicionar funcionalidades adicionais ao VS Code, permitindo o uso do VS Code para praticamente qualquer plataforma e linguagem de codificação. Atualmente, algumas das extensões populares do VS Code que existem para as plataformas incorporadas são PlatformIO, Particle Workbench e Arduino, entre outros.
No entanto, até o momento, uma extensão de código VS adequada ou, em outras palavras, uma extensão de código VS completa para configurar, build e debugar projetos usando Zephyr RTOS sem modificar o sistema operacional subjacente não foi desenvolvida. PlatformIO fez um trabalho muito bom, no entanto, ainda requer a instalação de um SDK personalizado para funcionar com o ecossistema PlatformIO, às vezes exigindo que os usuários instalem um SDK redundante e ocupem espaço de armazenamento extra, caso já o tenham instalado anteriormente. Por exemplo, um ZephyrRTOS estoque e um Zephyr RTOS baseado em PlatformIO modificado. Além disso, PlatformIO atualmente não oferece suporte aos dispositivos Nordic mais recentes ou ao SDK nRF Connect, dificultando o desenvolvimento de aplicativos usando os recursos PlatformIO nesses SoCs mais recentes do mercado.
Também tem havido discussões contínuas no tópico de problemas do Zephyr para criar tal extensão especificamente para Zephyr RTOS que simplificaria o processo de configuração enormemente, eliminando a necessidade de alguém aprender sobre os detalhes de configuração do VS Code ou dos conjuntos de ferramentas Zephyr subjacentes.
O que é nRF Connect for Visual Studio Code?
Nordic Semiconductor anunciou recentemente e lançou uma versão de amostra de seu nRF Connect for VS Code.
nRF Connect for VS Code é simplesmente uma extensão do Visual Studio Code. Ele permite que os usuários do nRF Connect SDK e Zephyr RTOS:
- Desenvolva seu código de aplicativo
- Build e gere o firmware do aplicativo
- Flash a imagem para o dispositivo e
- Depurar aplicativos
direto do ambiente do VS Code.
Esta extensão utiliza o nRF Connect SDK e Zephyr RTOS pré-instalados, permitindo aos desenvolvedores alternar entre o código VS ou a linha de comando para o desenvolvimento do projeto. Quão legal é isso :)
Embora esta extensão seja direcionada para nRF Connect SDK e Zephyr RTOS, ela foi construída para fazer uma coisa, e fazer isso direito: tornar o desenvolvimento baseado em Zephyr uma brisa. Para uma experiência perfeita, a extensão fornece recursos extensivos de desenvolvimento e depuração para dispositivos da série Nordic nRF91, nRF53 e nRF52 no Windows, macOS e Linux. A extensão pode reconhecer nRF dev kits com a interface J-Link OB e mostrar seus nomes. Os desenvolvedores também podem usar dispositivos J-Link / Trace autônomos para programar e depurar os respectivos dispositivos.
Observe que a extensão ainda está em desenvolvimento, mas já fornece alguns recursos ricos e muito necessários que examinaremos neste tutorial.
Para o desenvolvimento e teste desta extensão, usaremos o módulo BREAKOUT NINA B406 baseado em NRF52833 personalizado conectado por meio da interface SWD e código VS para macOS com nRF Connect SDK v2.5.0. A razão para usar a interface SWD é tirar proveito do recurso de depuração que esta extensão oferece. Também seguiremos as diretrizes iniciais fornecidas pelo Nordic em seu blog para começar a usar o nRF Connect for VS Code. Aqueles que não querem ler podem ir diretamente ao YouTube playlist criada por Nordic que mostra como usar a extensão por meio de vídeos passo a passo.
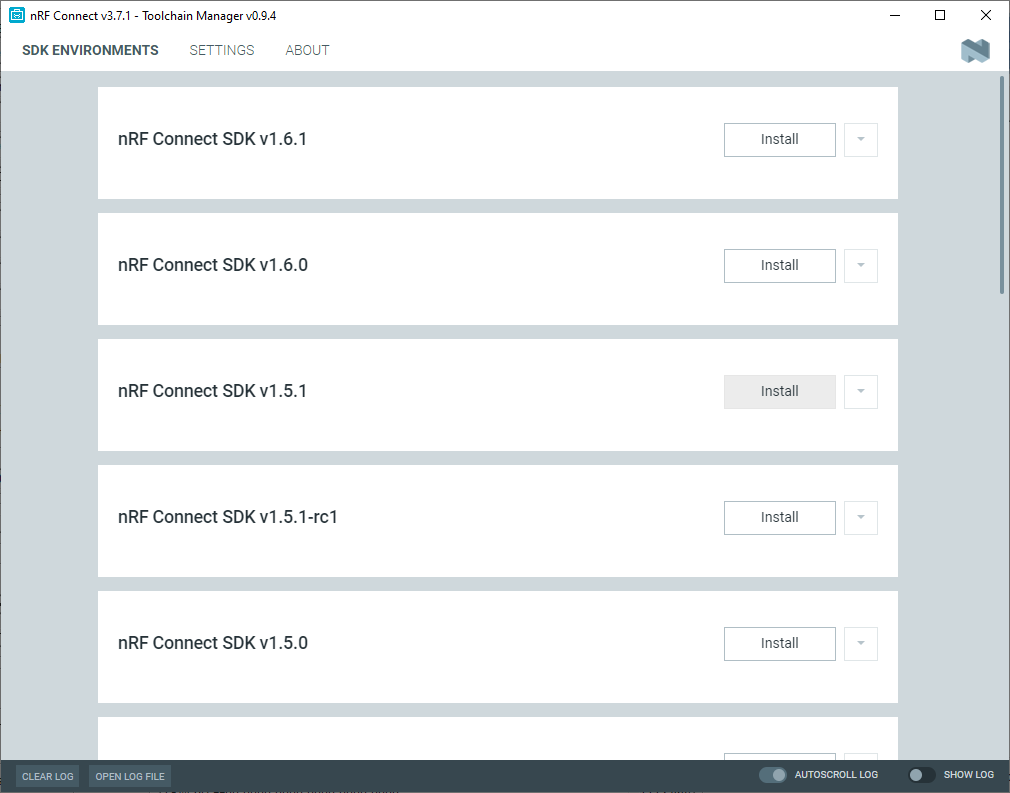
Instalação
How to install the extension - nRF Connect for VS Code
- nRF Connect for VS Code, a extensão principal desenvolvida pela equipe Nordic que contém uma interface para o sistema de compilação e nRF Connect SDK, bem como ferramentas externas como guiconfig. Guiconfig é uma interface de configuração gráfica para explorar as opções disponíveis do Zephyr Kconfig e fazer alterações temporárias. Além disso, Cortex-Debug é instalado automaticamente por esta extensão para fornecer suporte de depuração para microcontroladores ARM Cortex-M.
- DeviceTree para o projeto Zephyr, que fornece suporte a idiomas DeviceTree.
- Kconfig para o Projeto Zephyr, que fornece suporte ao idioma Kconfig.
- Terminal nRF, um terminal serial e RTT integrado.
nRF Connect for Desktop - Downloads - nordicsemi.com



















Compilando (WEST)

Assim que o projeto for compilado com sucesso, no painel de navegação do projeto, você verá todos os arquivos gerados. Dê uma olhada nesses arquivos e estruturas.

Os arquivos de código principais estão localizados em um subdiretório chamado src , que é uma abreviatura de “fonte”. No painel esquerdo, você deve ver seu projeto listado e, abaixo dele, uma série de subdiretórios. Expanda o subdiretório src clicando nele e você deverá ver um arquivo main.c. Clique neste arquivo para abri-lo na janela do editor do VS.
A estrutura do arquivo e os arquivos de saída são semelhantes aos criados usando ferramentas de linha de comando no Zephyr RTOS. A única diferença é que, em vez de criá-los manualmente, a extensão faz tudo isso em seu nome. Essa é a beleza de trabalhar com IDEs. Além disso, agora também existe um DeviceTree para inspecionar as definições da placa.
No diretório do projeto, agora há também a guia ACTIONS que lista alguns dos botões de comando principais, como Build , Pristine build , Menuconfig , Flash e Debug .
Por trás da cena…
Vejamos o que realmente acontece quando a extensão invoca alguns dos comandos:
O botão Build constrói o aplicativo Zephyr a partir da fonte e realmente invoca
west build -b <BOARD> --build-dir path/to/build/directory
onde o diretório fonte é automaticamente selecionado pela extensão, ou seja, o projeto ativo que o desenvolvedor pretende compilar.

Selecionar a Pristine Build gera um novo diretório de build e remove todos os subprodutos das construções anteriores.
west build --pristine -b <BOARD> --build-dir path/to/build/directoryUm dos comandos importantes que muitos de vocês podem não estar cientes é o menuconfig : uma interface baseada em curses que é executada no terminal para explorar as opções disponíveis do Zephyr Kconfig e fazer alterações temporárias. Clicar em “Menuconfig” trará a interface de configurações do kernel do Zephyr do seu projeto, permitindo que você altere diferentes configurações do terminal. Mais informações podem ser encontradas na documentação Projeto Zephyr.
Caso aconteça o seguinte erro: (WINDOWS)
"The terminal process failed to launch: Path to shell executable "cmd" is not a file or a symlink."
Vá em NRFCONNECT FOR DESKTOP ---> TOOLCHAIN MANAGER---> OPEN COMMAND PROMPT, então copie do TERMINAL do VISUAL STUDIO CODE, por exemplo:
C:\Windows\system32\cmd.exe /d /s /c "west build --build-dir c:/ncs/v2.5.0/zephyr/samples/sensor/bme680/build c:/ncs/v2.5.0/zephyr/samples/sensor/bme680

Antes de passarmos para o flash do código no dispositivo, vamos dar uma olhada rápida no código-fonte do projeto.
/* * Copyright (c) 2018 Bosch Sensortec GmbH * * SPDX-License-Identifier: Apache-2.0 */
#include <zephyr/drivers/sensor.h>#include <zephyr/kernel.h>#include <zephyr/device.h>#include <stdio.h>
int main(void){ const struct device *const dev = DEVICE_DT_GET_ANY(bosch_bme680); struct sensor_value temp, press, humidity, gas_res;
if (!device_is_ready(dev)) { printk("sensor: device not ready.\n"); return 0; }
printf("Device %p name is %s\n", dev, dev->name);
while (1) { k_sleep(K_MSEC(3000));
sensor_sample_fetch(dev); sensor_channel_get(dev, SENSOR_CHAN_AMBIENT_TEMP, &temp); sensor_channel_get(dev, SENSOR_CHAN_PRESS, &press); sensor_channel_get(dev, SENSOR_CHAN_HUMIDITY, &humidity); sensor_channel_get(dev, SENSOR_CHAN_GAS_RES, &gas_res);
printf("T: %d.%06d; P: %d.%06d; H: %d.%06d; G: %d.%06d\n", temp.val1, temp.val2, press.val1, press.val2, humidity.val1, humidity.val2, gas_res.val1, gas_res.val2); } return 0;}
}
O código quase não precisa de qualquer descrição, é basicamente o exemplo para ler o BME680 e mostrar os conteúdos das suas grandezas.
O próximo passo é fazer o upload para a placa, então vamos conectar nossa placa primeiro. Aqui, conectaremos o BREAKOUT U-BLOX NINA B406 que será usado para fazer o flash via interface JTAG SWD (Segger J-LINK). Assim que a placa for conectada e reconhecida, ela será listada na guia CONNECTED DEVICES, conforme mostrado.
Em seguida, clique no botão Flash . O nRF Connect for VS Code fará o upload do código compilado para a placa selecionada. Para piscar, primeiro, a extensão especifica o diretório de build, usando
west flash --build-dir path/to/build/directory



Depurando o Firmware (somente com J-LINK OFICIAL)
Vamos explorar um dos últimos recursos do nRF Connect for VS Code, ou seja, depuração de código. Como o Nordic nRF5340-DK inclui um probe de depuração integrado, podemos usar os recursos de depuração sem nenhuma configuração extra. Para iniciar a sessão de depuração, primeiro vamos definir um ponto de interrupção em nosso código e clicar no botão “Debug” na guia ACTIONS .


Uma vez que a sessão de depuração começa, pode-se percorrer o código usando botões de controle, definir pontos de interrupção e adicionar variáveis ao Watch window mostrado abaixo.

Conclusão
A curva de aprendizado para nRF Connect for VS Code é curta e rápida. Com o editor de código VS e seu autocomplete de código poderoso, agora você pode escrever códigos mais rápido e melhor para seus projetos Zephyr.
Esperançosamente, na versão futura, todas as dependências necessárias para fazer o trabalho de extensão nRF Connect serão instaladas e gerenciadas automaticamente.
Resumindo, nRF Connect for VS Code é um grande passo em frente para o ecossistema de desenvolvimento Zephyr RTOS. Para mim, pelo menos, vai substituir completamente o meu ambiente de desenvolvimento do dia-a-dia. O sistema de gerenciamento de cadeia de ferramentas dentro da extensão é excelente e trará grandes aumentos de produtividade para o desenvolvimento embarcado.
Usarei nRF Connect for VS Code para muitos de meus próximos projetos e também revisitaremos nRF Connect for VS Code em um futuro próximo para aprender mais sobre os recursos avançados deste maravilhoso ambiente de desenvolvimento quando a versão completa for lançada por o Nordic Semi.
Se você tiver perguntas ou comentários, sinta-se à vontade para me enviar um e-mail ou postá-los no fórum de suporte técnico do Nordic.
Boa codificação!
Questões: suporte@smartcore.com.br
Outras referências
content.u-blox.com/sites/default/files/NINA-B40_DataSheet_UBX-19049405.pdf
开发你的第一个NCS(Zephyr)应用程序 - iini - 博客园 (cnblogs.com)
Uninstall visual studio code in windows - Stack Overflow
DEVICE_DT_GET_ONE - ERROR - Nordic Q&A - Nordic DevZone - Nordic DevZone (nordicsemi.com)
Hi @Miguel,
If I am correct, the nRF Connect extension currently only recognizes Nordic's nRF dev kits with J-Link OB IF and show their names. You can still use standalone J-Link/Trace devices for programming and debugging (as you have done), but the device name will not show as they are used for general purposes.
Nordic's nRF dev kits come with their own Vendor IDs which makes the extension recognize the names, similar to their NRF Connect Programmer.
Hope this clarifies your question.
-Rajeev













